Robotic SphereDesigning and building a remote control sphere
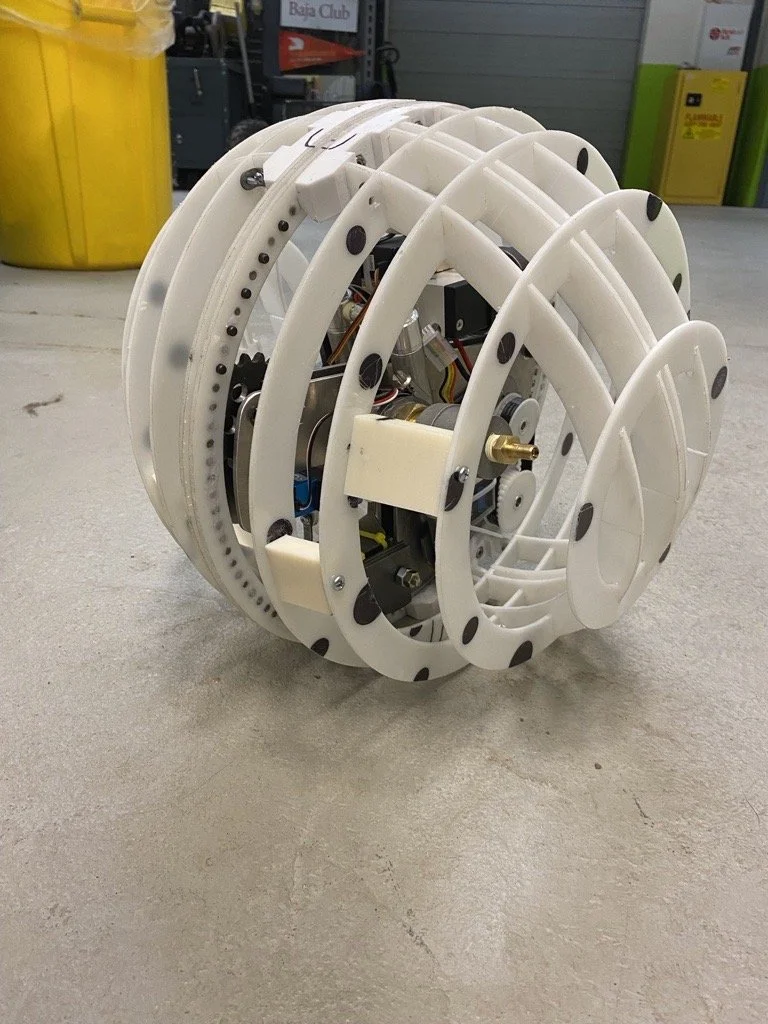

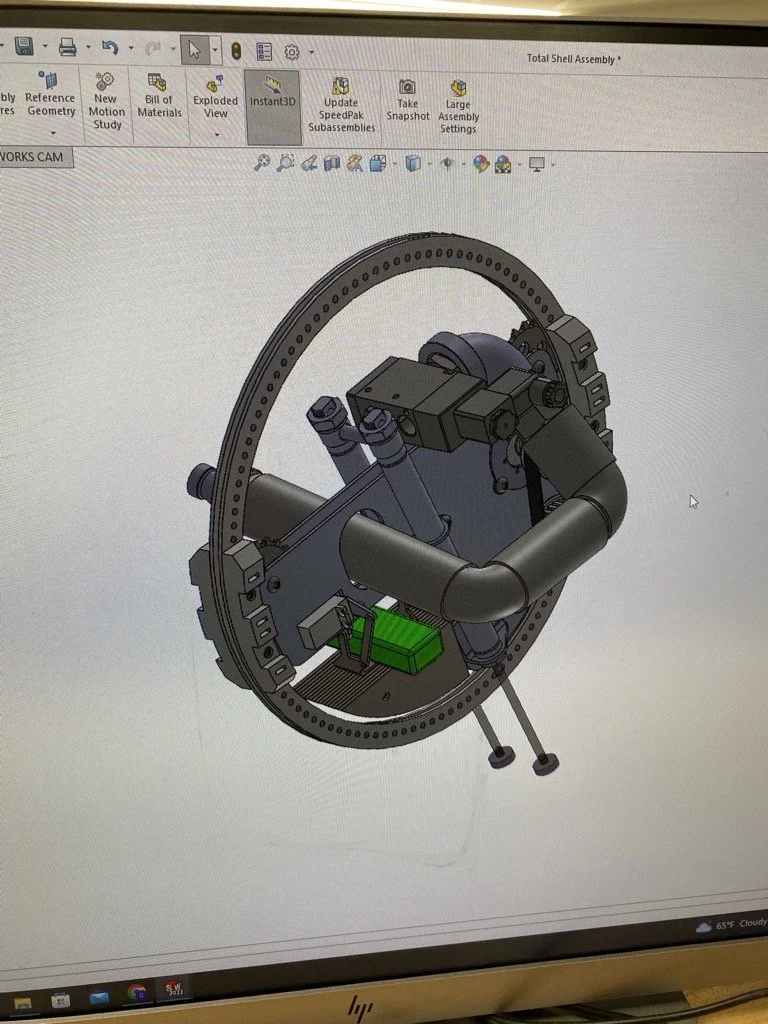
For my Design of Mechanical Systems class at Union College my team was tasked with designing and building a spherical robot capable of maneuvering through a canine agility course including jumping over an 18 inch hurdle. To achieve this, I led my team in the design of a unique concentric ring outer shell, a peg-chain drivetrain system, a counterweight steering mechanism, and a pneumatic jumping system. While the maneuverability was very successful, the jumping system fell short of the ambitious hurdle.